DiffuseBot 改善物理拡張生成拡散モデルを用いた柔らかいロボットの設計
DiffuseBot 改善物理拡張生成拡散モデルを用いた柔らかいロボットの設計
柔らかいロボットシステムの設計には、システムの形状、部品、挙動のトレードオフを考慮する必要があり、これは難しく時間がかかる作業でした。
MITのTsun-Hsuan Wang、Pingchuan Ma、Yilun Du、Andrew Spielberg、Joshua B. Tenenbaum、Chuang Gan、Daniela Rusは、それらの問題を解決する Generative Diffusion Models ベースの DiffuseBot への貢献を報告しました。
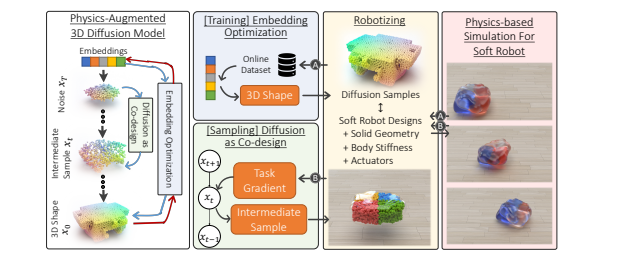
DiffuseBot は、さまざまなタスクのための柔らかいロボットの形態と制御を共同で設計する課題に取り組んだフレームワークでした。DiffuseBot の目標は、拡散モデルの力を活用して最適なロボット設計を生成し、事前にトレーニングされた 3D 生成モデルを利用することでした。このフレームワークは、物理ベースのシミュレーションと拡散プロセスを組み合わせ、幅広いタスクで優れた柔らかいロボットの設計を生み出しました。DiffuseBot は、拡散ベースの合成を物理動力学シミュレーションで補完することで、様々なタスクに最適化された柔らかいロボットの形態を生成し、自動化し、共同設計プロセスを加速する革新的なアプローチを導入しました。このアプローチにより、多様で高性能なロボット設計を自動的に生成することが可能になりました。DiffuseBot は、自然界で見られる多様な設計と現代の柔らかいロボティクスの反復的な性質との間のギャップを埋め、この分野での効率的な自動コンテンツ作成のためのフレームワークを提供しました。
DiffuseBot の開発方法
柔らかいロボットの共同設計は、柔らかいロボットの形状と制御の共同最適化を指し、これには、ロボットのための最適な形状、剛性、およびアクチュエータの配置を見つけること、アクチュエータの適切な制御信号を決定することが含まれます。その目標は、ロボットの形態と制御パラメータを考慮した損失関数を最小化することでした。共同設計の最適化は、ボディと制御変数の複雑な関係、競合する設計の変更、柔軟性と効果の間のトレードオフに起因して難しいものでした。彼らは最初に、拡散モデルを活用して最適なロボット設計を探すために、さまざまなロボットを生成し、事前にトレーニングされた 3D 生成モデルの構造バイアスを利用しました。
彼らは、Point-E 拡散モデルから得られた拡散サンプルをロボット化するプロセスを説明しました。拡散サンプルは表面ポイントクラウドの形式であり、物理ベースのシミュレーションで直接ロボットとして使用することはできませんでした。彼らは、「埋め込み最適化」と呼ばれる方法を提案し、拡散サンプルを評価できるロボット形状に変換しました。 このプロセスはいくつかのステップを経て行われました。まず、彼らは拡散モデルを使用してデータを生成し、物理ベースのシミュレーションでサンプルを評価しました。その結果を集約し、拡散サンプルの埋め込みを最適化しました。彼らは、固体ジオメトリを入力とする Material Point Method (MPM) ベースのシミュレーションを使用しました。これには、表面ポイントクラウドを固体ジオメトリに変換し、途中のステップでの拡散サンプルの非構造化との取り扱いの2つの課題がありました。これらの課題に対処するために、彼らは、各拡散時間ステップでクリーンサンプルを予測するために denoising diffusion implicit model (DDIM) を使用しました。クリーンサンプルは、シミュレーション用のより良く構造化されたデータの作成に使用されました。予測された表面ポイントは、表面メッシュの再構築と、その内部で固体ポイントクラウドをサンプリングすることで固体ジオメトリに変換されました。彼らは、Shape As Points から別のベクトルなしポアソン表面再構築への最適化アプローチを変更しました。 固体化プロセスを拡散サンプラーに統合するために、彼らは、予測された表面ポイントに対する固体ジオメトリの勾配をガウシアンカーネルを使用して計算しました。この勾配は、その近くにある予測された表面ポイントによって各固体ポイントがどのように影響を受けるかを制御しました。また、彼らは、固体ジオメトリに基づいてロボット用のアクチュエータ配置と剛性のパラメータ化を定義しました。アクチュエータは筋繊維として組み込まれ、剛性は簡便のために一定とされました。
彼らは、最適化と共同設計を通じてロボットのパフォーマンスを向上させるための Physics Augmented Diffusion Model (PADM) を提案しました。PADM は埋め込み最適化と拡散として共同設計の2つの主要なステップから構成されていました。 埋め込み最適化ステップでは、拡散モデルから新しいデータを積極的に生成し、それをバッファに保存しました。物理ベースのシミュレーションを使用して生成されたデータのパフォーマンスを評価しました。埋め込みは、拡散モデルと偏ったデータ分布に依存するように最適化されました。このアプローチにより、トレーニングデータセットを手作業で選別する必要がなくなり、全体的な生成の劣化のリスクを回避し、新しいタスクごとにモデルウェイトを保存するコストも節約されました。 拡散として共同設計ステップでは、拡散サンプリングプロセスを共同設計の最適化に再構成して、個々のサンプルのパフォーマンスをさらに向上させました。これは、勾配ベースの最適化テクニックとマルコフチェーンモンテカルロ (MCMC) サンプリングを統合することで達成されました。拡散時間はロボット設計変数に変換され、制御変数は設計に適応するように最適化されました。このプロセスは、拡散ステップごとに定期的に行われました。
物理シミュレーションを拡散モデルで拡張することにより、ロボットのパフォーマンスの向上を実証する実験結果を提供しました。その結果は、受動ダイナミクスのタスク (バランス、着陸)、運動タスク (這い回る、跨ぐ)、操作タスク (把持、箱の移動) でのパフォーマンスの向上を示しました。
DiffuseBot は本当に有用だったのか?
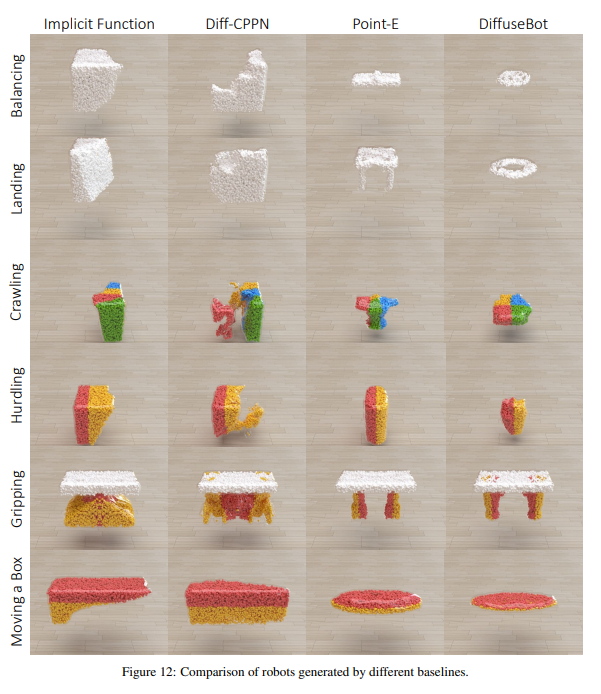
提案された手法の有効性を評価するための実験と分析を行いました。彼らは、彼らの手法である DiffuseBot をさまざまなベースラインと比較し、手法のさまざまな要素の影響を分析するための略奪研究を行いました。 まず、物理ユーティリティの向上のための埋め込み最適化と拡散として共同設計を組み合わせた結果を示す表を示しました。各エントリについては、設定されたランダムなシードで 100 のサンプルを描画し、有効な比較を確保しました。その結果、提案手法を使用した場合、すべてのタスクでのパフォーマンスが向上したことが示されました。ただし、拡散プロセスのステレオ型と、一部のシナリオでの微分可能シミュレーションの品質の低さにより、サンプルレベルでのパフォーマンスが常に単調に向上しないことに留意しました。 次に、彼らは、柔軟なロボット共同設計で一般的に使用されているさまざまなベースラインと DiffuseBot を比較しました。それぞれのベースライン手法について、異なるランダムな初期化を 20 回実行し、最適なものを選択しました。DiffuseBot の場合、20 のサンプルを描画して最適なものを報告しました。その結果、DiffuseBot はすべてのベースライン手法を上回りました。 その後、DiffuseBot によって生成されたさまざまなタスクのデザインの例を紹介しました。これらのロボットは、さまざまなタスクに向けたデザインを生成する DiffuseBot の多様性と柔軟性を示しています。また、初期の設計からタスク目標に合致した改良された設計に進化する様子も示されました。 略奪分析では、提案手法を理解するために這うタスクで実験を行いました。埋め込み最適化の異なるアプローチを比較し、テキストプロンプトの手動設計は機能的なロボット設計のために有効ではなかったことが分かりました。拡散モデルそのものの微調整もより良いパフォーマンスをもたらさなかった。また、拡散として共同設計を異なるステップで適用することの影響を調査し、適用するタイミングの最適なポイントを見つけました。さらに、拡散後の共同設計最適化と彼らの手法を比較し、彼らの手法の方がわずかに優れたパフォーマンスを示した。彼らは、拡散モデルに人間のフィードバックを組み込む柔軟性も強調しました。ヒトのテキストフィードバックを含む異なるデータ分布を共同設計フレームワークに組み込む能力を実証しました。 最後に、提案手法の現実世界での適用可能性を実証するために、把持タスクのための物理ロボットを製造しました。3D カーボンプリンターを使用して生成されたデザインを再現し、アクチュエータにはテンドン伝達を使用しました。物理ロボットの製作と現実世界への展開には課題があり、この実験は概念実証にすぎないことが指摘されました。 全体として、実験と分析は、さまざまなタスクの柔軟なロボット設計を生成する DiffuseBot の効果的で柔軟な性質を支持しています。