Système robotique à plusieurs étapes pour une précision améliorée dans les procédures neurochirurgicales stéréotactiques guidées par IRM
Une étude révolutionnaire de Zhuoliang He et de ses collègues de l’Université Johns Hopkins représente une avancée décisive dans l’intégration de la robotique à l’imagerie par résonance magnétique (IRM) peropératoire pour améliorer significativement la précision des procédures neurochirurgicales stéréotactiques. Publiée le 10 décembre 2023, cette recherche présente un nouveau système robotique qui combine ingénieusement la dextérité manuelle avec un réglage automatique, facilité par la robotique souple, pour positionner avec précision des instruments tels que des aiguilles de biopsie et des électrodes pendant les chirurgies cérébrales.
La capacité de l’IRM à fournir des images en 3D à haute résolution des structures neurovasculaires critiques et des pathologies est inégalée mais est communément limitée aux évaluations pré- et postopératoires. Les erreurs de positionnement qui ont tendance à s’accumuler lors de la mise en place d’un cadre stéréotactique, de l’enregistrement d’images et du déplacement cérébral ont limité les procédures neurochirurgicales. La recherche de l’Université Johns Hopkins a cherché à surpasser ces limitations en tirant parti de la capacité de l’IRM peropératoire pour surveiller en temps réel et suivre les instruments tout au long des chirurgies, nécessitant des outils de positionnement précis et dynamiques.
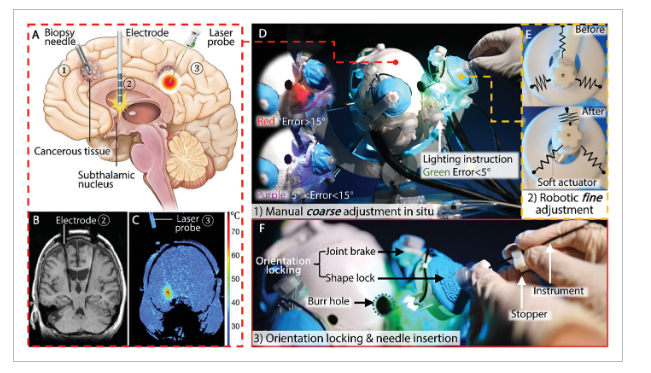
Le système robotique résultant présente plusieurs caractéristiques novatrices. Principalement, il présente une méthode de positionnement en deux étapes : un premier réglage manuel interactif grossier qui donne au chirurgien un contrôle dans un espace de travail de ±30°, suivi de l’innovation du réglage automatique. Ce réglage automatisé présente des spécifications impressionnantes, atteignant une erreur d’orientation inférieure à 0,2°, une fréquence de réponse de 1,4 Hz et une résolution fine de 0,058° en positionnement. Il atteint ce niveau de précision et de réactivité grâce à une conception soigneuse et à l’optimisation de l’architecture de l’actionneur de robotique souple, associée à des mécanismes robustes de verrouillage d’orientation dans les deux étapes du système robotique.
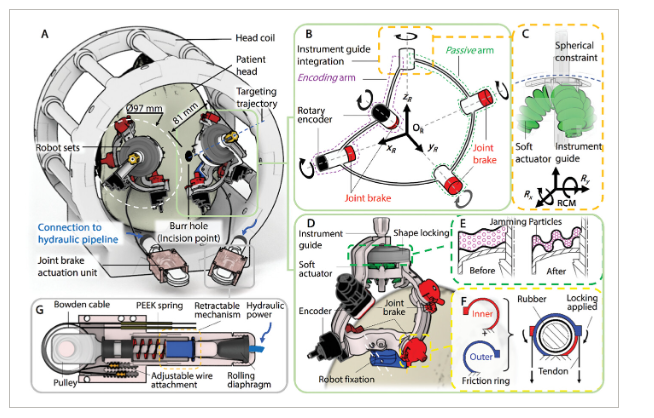
Pesant seulement 203 grammes et avec des dimensions de seulement Ø97 mm sur 81 mm en hauteur, ce positionneur robotique monté sur le crâne s’insère dans la plupart des bobines de tête d’IRM standard et conserve la flexibilité pour des procédures unilatérales et bilatérales. De plus, il intègre sans problème des marqueurs de suivi sans fil personnalisés pour assurer un enregistrement précis de l’IRM, un aspect essentiel pour s’adapter à la nature itérative en temps réel de la numérisation par IRM peropératoire.
Le processus de validation complet de ce système comprenait des évaluations de précision en laboratoire et des tests basés sur l’IRM, impliquant des fantômes de crâne et un sujet cadavérique, avec des erreurs de ciblage trouvées inférieures à 0,8 mm, 1,7 mm et 2,2 mm respectivement. Il est important de souligner que ces validations ont conclu que le robot ne compromet pas la qualité de l’image par IRM ni ne génère d’interférences électromagnétiques, confirmant sa compatibilité et sa sécurité dans l’environnement de l’IRM.
Au-delà du simple positionnement des instruments, les caractéristiques novatrices de l’appareil facilitent la mise en place et l’utilisation, permettant des interventions bilatérales tout en réduisant l’inconfort pour les patients. Son processus de réglage en deux étapes s’intègre en douceur dans les flux de travail chirurgicaux, améliorant ainsi l’efficacité et raccourcissant potentiellement les temps de chirurgie. Il est conçu avec des signaux lumineux interactifs pour aider le chirurgien pendant les ajustements manuels et un mécanisme de blocage granulaire pour verrouiller l’orientation du guide de l’instrument pendant les ajustements fins.
Les résultats de ce travail articulent un récit convaincant qui pourrait révolutionner le domaine de la neurochirurgie stéréotactique. La recherche apporte une contribution substantielle en développant un système robotique semi-automatisé qui associe l’habileté manuelle d’un chirurgien à la précision de la robotique et du guidage par IRM, surmontant les défis qui ont affecté la neurochirurgie depuis des années. Le système privilégie un format compact, conservant une conception légère et intuitive qui ne compromet ni l’automatisation ni la couverture de l’espace de travail.
En regardant vers l’avenir, malgré le succès démontré, l’article souligne le potentiel d’amélioration. Explorer des techniques de fabrication plus fiables, améliorer le modèle cinématique et intégrer un système de contrôle plus avancé sont recommandés comme prochaines étapes. Néanmoins, le système présente une pertinence clinique et une promesse considérable pour étendre l’assistance robotique en neurochirurgie, propulsant le domaine vers un nouvel horizon où la précision et la sécurité convergent.
En conclusion, l’approche de l’équipe de Hopkins représente un mélange synergique de neurochirurgie, d’imagerie peropératoire et d’ingénierie robotique. Cette recherche a le potentiel d’équiper les neurochirurgiens d’un outil capable de minimiser les risques et de maximiser l’efficacité des interventions où la précision millimétrique est essentielle. À mesure que l’adoption clinique progresse, l’impact de cette étude résonnera probablement bien au-delà des limites du laboratoire et jusqu’aux salles d’opération du monde entier, améliorant les soins aux patients et redéfinissant les limites de la précision chirurgicale.