Multi-Stage Robotic System for Enhanced Precision in MRI-Guided Stereotactic Neurosurgical Procedures
Multi-Stage Robotic System for Enhanced Precision in MRI-Guided Stereotactic Neurosurgical Procedures
A groundbreaking study from Zhuoliang He and colleagues at Johns Hopkins University represents a pivotal step forward in integrating robotics with intra-operative magnetic resonance imaging (MRI) to significantly enhance precision in stereotactic neurosurgical procedures. Published on December 10, 2023, this research introduces a novel robotic system that ingeniously combines manual dexterity with automatic fine-tuning, facilitated by soft robotics, to accurately position instruments such as biopsy needles and electrodes during brain surgeries.
MRI’s ability to provide high-resolution, 3D images of critical neurovascular structures and pathologies is unmatched but commonly restricted to pre- and post-operative assessments. The positional errors that tend to accumulate from stereotactic frame setup, image registration, and brain shift have constrained neurosurgical procedures. Johns Hopkins University’s research endeavored to transcend these limitations by leveraging intra-operative MRI’s capacity for real-time monitoring and instrument tracking throughout surgeries, necessitating precise and dynamic positioning tools.
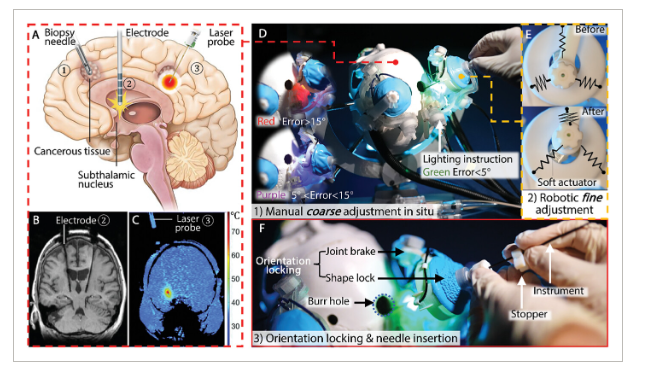
The resulting robotic system is novel in several aspects. Primarily, it features a two-stage positioning method: an initial interactive manual coarse adjustment that grants the surgeon control within a workspace of ±30°, followed by the innovation of automatic fine-tuning. This automated adjustment boasts impressive specifications, achieving an orientation error under 0.2°, response speed at 1.4 Hz, and a fine resolution of 0.058° in positioning. It achieves this level of precision and responsiveness through careful design and optimization of the soft robotics actuator architecture, paired with robust orientation locking mechanisms in both stages of the robotic system.
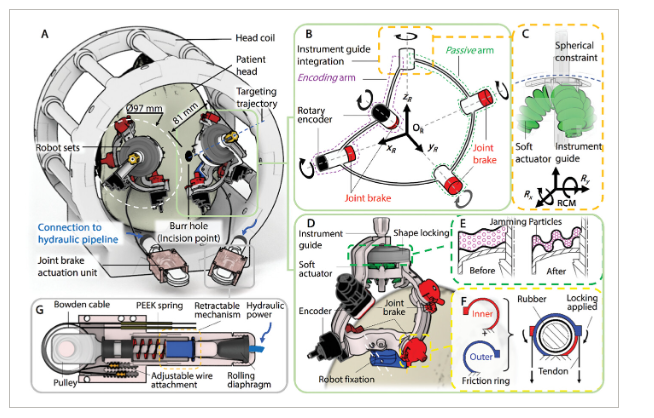
Weighing only 203 grams and featuring dimensions of just Ø97 mm by 81 mm in height, this skull-mounted robotic positioner fits within most standard MRI head coils and maintains the flexibility for both unilateral and bilateral procedures. Furthermore, it seamlessly incorporates custom-made wireless omni-directional tracking markers to ensure accurate MRI registration, an essential aspect of adapting to the real-time iterative nature of intra-operative MRI scanning.
The comprehensive validation process of this system included lab-based accuracy assessments and MRI-based testing, involving skull phantoms and a cadaver subject – with targeting errors found to be less than 0.8 mm, 1.7 mm, and 2.2 mm respectively. Importantly, these validations concluded that the robot does not compromise MRI image quality or generate electromagnetic interference, confirming its compatibility and safety within the MRI environment.
Beyond just instrument positioning, the device’s novel characteristics facilitate ease of setup and use, accommodating bilateral interventions while reducing discomfort for patients. Its two-stage adjustment process smoothly integrates into surgical workflows, thereby enhancing efficiency and potentially shortening surgery times. It is designed with interactive lighting signals to aid the surgeon during manual adjustments and a granular jamming mechanism to lock the instrument guide’s orientation during fine adjustments.
The results of this work articulate a compelling narrative that could revolutionize the field of stereotactic neurosurgery. The research adds a substantial contribution by developing a semi-automated robotic system that blends a surgeon’s manual skill with the precision of robotics and MRI-guidance, overcoming the challenges that have plagued neurosurgery for years. The system prioritizes a compact form factor, maintaining a lightweight and intuitive design that does not compromise on automation or workspace coverage.
Looking forward, despite the demonstrated success, the paper emphasizes the potential for further enhancement. Exploring more reliable fabrication techniques, improving the kinematic model, and integrating a more advanced controller system are recommended as the next steps. Nonetheless, the system exhibits clinical relevance and considerable promise for expanding robotic assistance in neurosurgery, propelling the field towards a new horizon where precision and safety converge.
In conclusion, the Hopkins team’s approach represents a synergistic blend of neurosurgery, intra-operative imaging, and robotic engineering. This research has the potential to equip neurosurgeons with a tool capable of minimizing risks and maximizing the efficacy of interventions where millimetric precision is critical. As clinical adoption progresses, the impact of this study will likely reverberate well beyond the confines of the laboratory and into operation theaters worldwide, enhancing patient care and redefining the boundaries of surgical precision.